
详细原理参考:【玩转RT-Thread】线程管理(详细原理)
一、线程创建
1、函数原型
| |
首先我们来看看线程创建函数返回值类型:

可以看到线程创建函数的返回值类型为:
rt_thread_t,找到定义处(如下图),可以看到它的返回值类型是一个结构体指针变量。

2、线程定义
那么我们先定义一个结构体指针的线程th1_ptr,这样通过rt_thread_create函数创建的进程控制块的地址就能直接赋值给th1_ptr变量:
| |
接下来就是我们给进程控制块传参了


3、线程创建判断
由于线程创建有返回值,所以我们此处再加入一个判断函数去判断线程是否创建成功
我们先来看下线程返回值(如下图)
如果
成功创建的话,返回值是会返回我们所创建的线程对象的
如果创建失败的话,可以看到是会返回一个RT_NULL,也就是0

| |
4、线程入口函数
我们在线程的入口处理函数写一个循环函数:
| |
注意:我们在使用线程的处理函数的循环函数的时候,一定要记得及时释放资源,也就是出让CPU资源,不然这个线程会一直执行并占用系统资源
- 编译,串口观察

由于RTT studio有内置的串口终端,我们直接打开

终端输入list_thread可以查看所有的线程

5、总结
这里也许就有疑问了,为什么线程入口函数的打印命令没有被执行?
其实我们再看th_demo线程的状态可以看到是init,参考【玩转RT-Thread】线程管理(详细原理)
当线程刚开始创建还没开始运行时就处于初始状态;在初始状态下,线程不参与调度。此状态在RT-Thread 中的宏定义为RT_THREAD_INIT
其实这句话就表明当线程处于初始化状态下是不参与系统调度的!
6、补充
线程错误码:

二、线程启动
函数原型
在主函数中加入命令,使线程进入就绪态:
| |
但是我们此时打开终端可以发现:线程入口函数虽然被执行,但线程状态为挂起态

解释:虽然我们调用rt_thread_startup函数使线程进入就绪态,但是回到入口函数我们可以看到,我们调用了rt_thread_mdelay函数使其有一定时间的休眠,从而进入了挂起态`
三、初始化线程
rt_thread_init
1、函数声明
| |
2、函数定义
| |
此处我们需要定义一个ret整型变量用于
rt_thread_init的返回值传参,然后定义一个线程结构体,用于静态线程传参。同时需要为线程栈分配内存,所以我们创建一个栈数组,注意这里的线程栈大小我们设定512,而线程的优先级设为19,比线程th1_demo要高一个优先级,后续观察现象。


3、线程入口函数
代码如下:
| |
4、判断创建状态
静态线程创建成功的话会返回0,失败的话会返回一个负值,若成功创建线程,我们调用rt_thread_startup函数使线程2进入就绪态,并执行线程处理函数。
| |
这里注意:由于我们线程2定义是一个数组,所以需要取地址进行线程开启
5、实验结果
分析:首先我们把线程1和线程2的启动函数都开启,可以看到线程1和线程2都处于挂起态,线程2的命令先于线程1执行,这是由于前面我们设定优先级给线程2(优先级19)比线程1(优先级20)高,所以在命令执行是先线程2,再线程1。
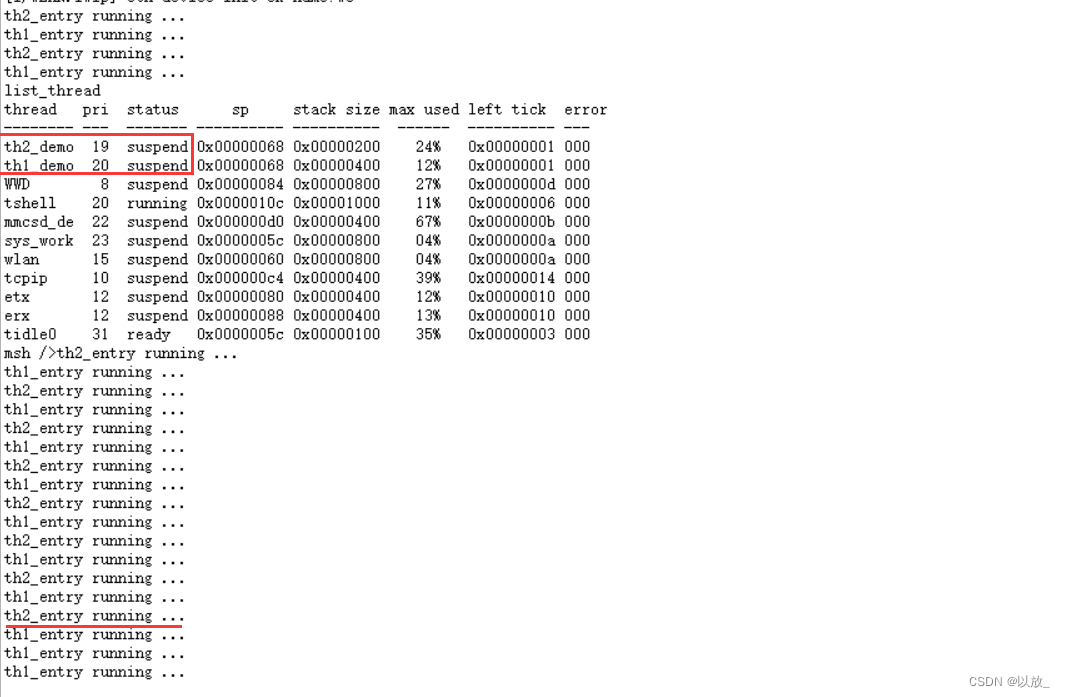
线程2在执行完10次循环后就结束进程了,此时在终端再次输入list_thread可以发现线程2已经退出,只剩下线程1还在循环执行
