
一、时钟节拍
任何操作系统都需要提供一个时钟节拍, 以供系统处理所有和时间有关的事件,如线程的延时、线程的时间片轮转调度以及定时器超时等。
RT-Thread 中,时钟节拍的长度可以根据 RT_TICK_PER_SECOND 的定义来调整,等于 1/RT_TICK_PER_SECOND 秒。也就是说,在RT-Thread中,系统的时钟节拍频率是由RT_TICK_PER_SECOND决定的!
rtconfig.h配置文件中定义:
频率是1000HZ周期是1/1000 s
所以节拍是1ms
#define RT_ TiCK PER_ SECOND 1000

1、void SysTick_Handler()
在RT-Thread中,当系统滴答定时器时间到了的时候,就会执行void SysTick_Handler(系统滴答定时器中断处理函数)这个回调函数(中断处理函数)
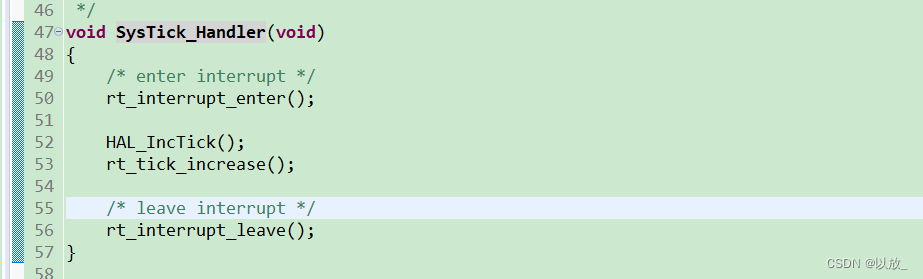
可以发现在
void SysTick_Handler()这个函数中,首先会执行中断入口函数,然后void rt_tick_increase对rt_tick(系统滴答时钟,初值为0,静态全局变量)进行自加操作,会记录从启动到现在的时钟节拍数
2、void rt_tick_increase()

也就是说,系统滴答定时器中断处理函数会每1ms触发一次systick定时器中断
3、rt_tick_get(void);
名称:获取系统统计函数
功能:返回当前操作系统的时钟数
返回值:返回当前时钟数

二、定时器管理
1、概念
定时器,是指从指定的时刻开始,经过一定的指定时间后触发一个事件,例如定个时间提醒第二天能够按时起床。定时器有硬件定时器和软件定时器之分:
1)硬件定时器是芯片本身提供的定时功能。一般是由外部晶振(HSE)提供给芯片输入时钟,芯片向软件模块提供一组配置寄存器,接受控制输入,到达设定时间值后芯片中断控制器产生时钟中断。硬件定时器的精度一般很高,可以达到纳秒级别,并且是中断触发方式。
2)软件定时器是由操作系统提供的一类系统接口,它构建在硬件定时器基础之上,使系统能够提供不受数目限制的定时器服务。
RT-Thread 操作系统提供软件实现的定时器,以时钟节拍(OS Tick)的时间长度为单位,即定时数值必须是 OS Tick 的整数倍,例如一个 OS Tick 是 10ms,那么上层软件定时器只能是 10ms,20ms,100ms 等,而不能定时为 15ms。RT-Thread 的定时器也基于系统的节拍,提供了基于节拍整数倍的定时能力。
2、RT-Thread定时器介绍
RT-Thread 的定时器提供两类定时器机制:
第一类是单次触发定时器,这类定时器在启动后只会触发一次定时器事件,然后定时器自动停止。
第二类是周期触发定时器,这类定时器会周期性的触发定时器事件,直到用户手动的停止,否则将永远持续执行下去。
另外,根据超时函数执行时所处的上下文环境,RT-Thread 的定时器可以分为 HARD_TIMER 模式(硬件定时器模式)与 SOFT_TIMER 模式(软件定时器模式),如下图。
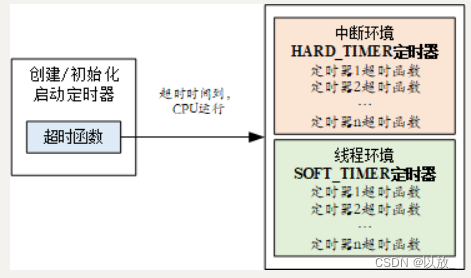
1)HARD_TIMER 模式:中断上下文
HARD_TIMER 模式的定时器超时函数在中断上下文环境中执行,可以在初始化 / 创建定时器时使用参数RT_TIMER_FLAG_HARD_TIMER来指定。
在中断上下文环境中执行时,对于超时函数的要求与中断服务例程的要求相同:执行时间应该尽量短,执行时不应导致当前上下文挂起、等待。例如在中断上下文中执行的超时函数它不应该试图去申请动态内存、释放动态内存等。
2)SOFT_TIMER 模式:线程上下文
SOFT_TIMER 模式可配置,通过宏定义 RT_USING_TIMER_SOFT 来决定是否启用该模式。
该模式被启用后,系统会在初始化时创建一个 timer 线程,然后 SOFT_TIMER 模式的定时器超时函数在都会在 timer 线程的上下文环境中执行。可以在初始化 / 创建定时器时使用参数 RT_TIMER_FLAG_SOFT_TIMER 来指定设置 SOFT_TIMER 模式。
3、定时器源码分析
1)RT-Thread OS 启动阶段,执行rtthread_startup函数,在该函数中调用了定时器初始化函数

2)rt_system_timer_init(硬件定时器初始化)
| |
3)rt_system_timer_thread_init(软件定时器初始化)

4、定时器工作机制
下面以一个例子来说明 RT-Thread 定时器的工作机制。在 RT-Thread 定时器模块中维护着两个重要的全局变量:
(1)当前系统经过的 tick 时间 rt_tick(当硬件定时器中断来临时,它将加 1);
(2)定时器链表 rt_timer_list。系统新创建并激活的定时器都会按照以超时时间排序的方式插入到 rt_timer_list 链表中。
如下图所示,系统当前 tick 值为 20,在当前系统中已经创建并启动了三个定时器,分别是定时时间为 50 个 tick 的 Timer1、100 个 tick 的 Timer2 和 500 个 tick 的 Timer3,这三个定时器分别加上系统当前时间 rt_tick=20,从小到大排序链接在 rt_timer_list 链表中,形成如图所示的定时器链表结构。

而 rt_tick 随着硬件定时器的触发一直在增长(每一次硬件定时器中断来临,rt_tick 变量会加 1),50 个 tick 以后,rt_tick 从 20 增长到 70,与 Timer1 的 timeout 值相等,这时会触发与 Timer1 定时器相关联的超时函数,同时将 Timer1 从 rt_timer_list 链表上删除。
同理,100 个 tick 和 500 个 tick 过去后,与 Timer2 和 Timer3 定时器相关联的超时函数会被触发,接着将 Timer2 和 Timer3 定时器从 rt_timer_list 链表中删除。
如果系统当前定时器状态在 10 个 tick 以后(rt_tick=30)有一个任务新创建了一个 tick 值为 300 的 Timer4 定时器,由于 Timer4 定时器的 timeout=rt_tick+300=330, 因此它将被插入到 Timer2 和 Timer3 定时器中间,形成如下图所示链表结构:

5、定时器相关接口
1)动态创建定时器
动态创建声明:
| |
详细函数定义:

查看flag定义:
| |
同时这里我们注意到
rt_timer_create这个函数的返回值是rt_timer_t,通过查找定义可以发现该类型是通过typedef重命名的也就是说
struct rt_timer<=>*rt_timer_t
| |
下面我们也可以详细看到rt_time这个结构体对定时器的一个详细描述
| |
2)删除定时器
函数声明:
| |
函数返回值:返回操作系统的状态,成功返回0,失败返回1

3)动态创建定时器演示
| |
在这里也可以看到,我们设置了一个名为tm_demo的定时器,设置超时时间为3s,同时flag我们是设置为周期定时和软件定时(flag设置详见上文flag定义 )。
| |
| |
4)开启定时器
函数声明:
| |
函数返回值:成功返回0,失败返回1

5)实例:
| |
此时我们在超时函数中编写代码:
| |
此时回到串口查看,就可以发现tm_demo这个定时器已经被激活了,并且定时器的周期和超时时间也都发生改变,由于我们在上面设置的超时时间为3S,所以在串口显示会三秒打印一次信息
6)静态创建定时器
函数定义:
| |
这里我们看下rt_timer_init这个函数的返回值和参数
返回值:void
参数:
| 参数 | 描述 |
|---|---|
| timer | 结构体指针类型 |
| name | 名字 |
| timeout | 超时回调函数指针 |
| parameter | 传递给超时回调函数的参数 |
| time | 定时器时间 |
| flag | 定时器标志 |
7)脱离函数(静态创建时使用)
描述:当静态创建的定时器不需要在使用时,我们调用下面这个函数接口
函数声明:
| |
返回值:成功返回0,失败返回1
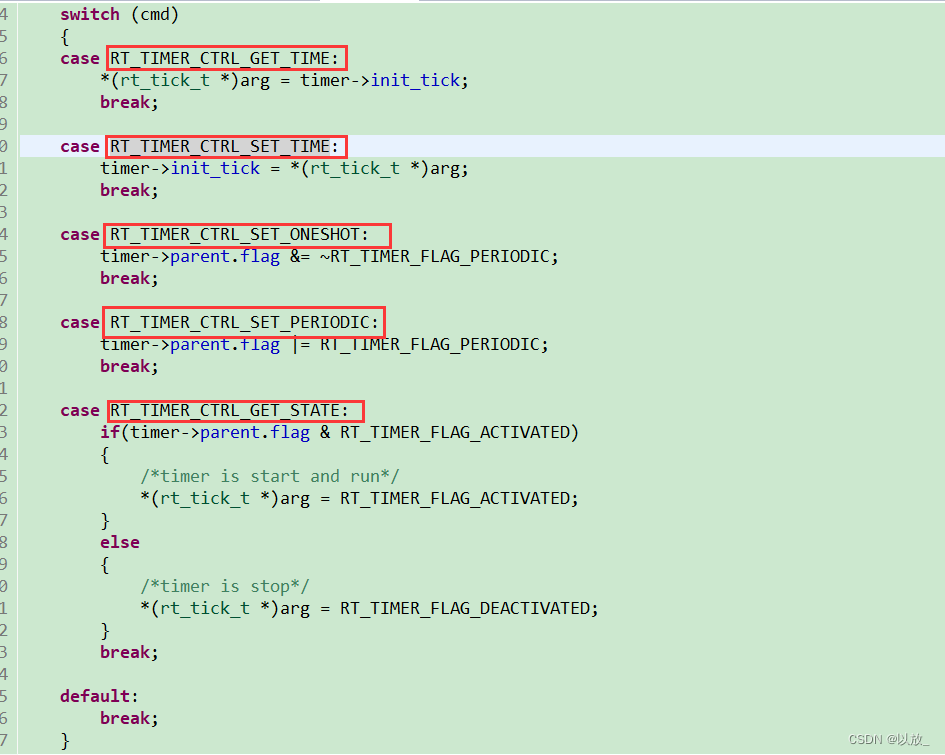
8)定时器控制
函数声明:
| |
cmd命令定义查看
| |
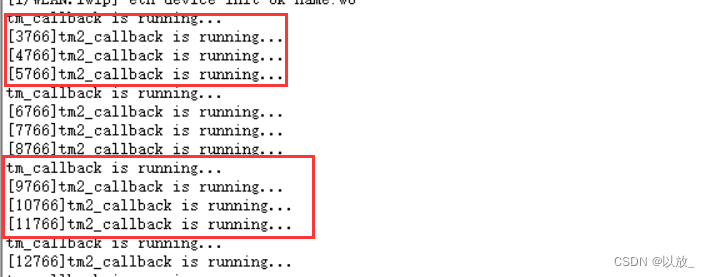
实例:
查看终端数据,可以发现终端执行顺序为:打印一次tm的中断回调函数信息,然后打印三次tm2的信息。
| |
三、高精度延时
注意:这个函数只支持低于1个OS Tick的延时,否则 SysTick会出现溢出而不能够获 得指定的延时时间
- 函数声明:
void rt_hw_us_delay(rt_uint32_t us);

- 应用场景:应用于某些场景下对高精度延时有要求的情况下